一、工作原理
1)纸箱从封箱机出来后由动力滚筒输送线输送纸箱,纸箱归整形式为1种需要进行2次,为输
送3竖箱后由推板推一次,再输送3竖箱后由推板推至机器人手爪抓取位置;
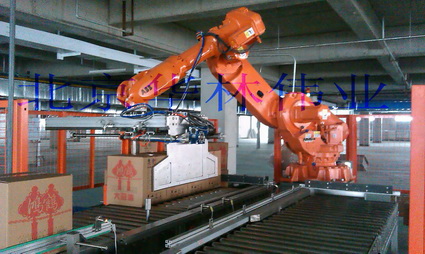
2)在得到归整装置把纸箱整形完毕的确认信号后,机器人动作2次,手爪抓取6箱,然后码放
到托盘上;
3)在机器人手爪离开输送线到安全位置后发送一个安全信号给输送线,输送线回复到下一个周
期工作;
4)再重复1)~3)流程直至全部码放完整垛;
5)一块托盘码完后,托盘输送线自动将满托盘输送到下工位等待位置,同时输送一块空托盘到
机器人码放工位等待新一个循环的开始;
6)完成产品码垛的托盘在等待工位通过叉车送到仓库;
7)空托盘以10块一叠的方式输送到托盘上料工位,由托盘分离、整形装置自动分成单块托盘
由输送线输送到码垛等待工位;
二、机器说明
1)机器人码垛机主干线采用三相四线制,并须可靠接地,由机器人控制柜控制手爪和安全门
的运行。配置统一规格的电缆线槽,出线孔周边有保护套。机器人码垛机设有二个急停开
关,均有明显标志,所有电控柜的设计、制作及安装均应符合国家电气技术的安全标准。
三相电、零线、接地线均使用不同颜色电线,交流、直流电线有明显区别以便维护保养。
电线、电缆在夹具、控制柜内需要转接时均经过接线端子,所有电线均配有冷压端子,所
有电线均有线码管以便区分。
2)所有机械设备和电气设备工作时,温升不得超过产品额定标准值,并且有良好的过载保护。
设有手动和自动两种控制运行方式,以便调试和维修时使用,同时设有明显的急停按钮和
故障报警等功能。
3)控制系统的主要控制元件等均采用进口产品,如采用法国施耐德的低压电器等,这些产品
的高质量和可靠性将为控制系统的稳定运行提供有效保障。
三、技术参数
供电要求
电 源: 3 相 400V(+10%,-15%), 50Hz
配电容量: 13KVA
物理参数
本体总高: 2240 mm
重 量: 1310 kg
环境参数
环境温度: 5C- 50C
相对湿度: 95%
噪声等级: <71dB